

La robótica y la agricultura de precisión, en busca de una producción más sostenible
Investigadores de la ETSIAAB participan en un proyecto europeo para mejorar la producción de cultivos orgánicos mediante el desarrollo de un sistema robotizado inteligente.
08-06-2021
Un equipo de investigadores de la Universidad Politécnica de Madrid (UPM), integrado por los grupos de Robótica y Cibernética (ROBCIB) del Centro de Automática y Robótica (CAR, CSIC-UPM) y del grupo de investigación LPF-Tagralia: Técnicas Avanzadas en Agroalimentación (LPF-Tagralia) de la Escuela Técnica Superior de Ingeniería Agronómica, Alimentaria y de Biosistemas (ETSIAAB), ha desarrollado un sistema robótico especializado en la fertilización individualizada de cada planta de cultivos heterogéneos en hilera. Esto ha sido posible gracias al análisis vegetativo realizado mediante un moderno sistema sensorial basado en mediciones láser e imágenes multiespectrales. Los resultados son muy prometedores y servirán para optimizar el uso de fertilizantes y minimizar así el impacto ambiental de los cultivos.
El proyecto SureVeg (Strip-cropping and recycling of waste for biodiverse and resoURce-Efficient intensive VEGetable production) por sus siglas en inglés, es un proyecto europeo en el que participa un consorcio de doce socios ꟷuniversidades, centros de investigación y empresasꟷ de siete países de la Unión Europea (Dinamarca, Países Bajos, Bélgica, Italia, Finlandia, España y Letonia) entre los que se encuentra la UPM.

Entorno de virtual altamente realista del campo de pruebas con cultivos en hiera para simulaciones y evaluación de algoritmos desarrollado en Unity3D
El equipo español, integrado por los grupos de investigación ROBCIB y LPF-Tagralia, tiene como objetivo dentro del proyecto el desarrollo de sistemas robóticos inteligentes para sistemas de cultivo en hileras. Esto lo han llevado a cabo mediante la integración de un robot manipulador con sistemas sensoriales y de actuación, aplicando algoritmos para la identificación, localización y evaluación de las necesidades de cada planta. Así, se busca aplicar un tratamiento individualizado a cada una, mitigando el impacto ambiental de insumos.
Los últimos avances en software de simulación han permitido desarrollar el proyecto en dos etapas: una de simulación virtual y otra de prueba real en campo.
En una primera fase, el equipo de investigación implementó un simulador altamente realista del campo de cultivo, recreando hileras de vegetales (repollos, alubias, habas), así como la gestión del sistema de comunicaciones con la plataforma robótica. Esto permitió evaluar los algoritmos de sistemas sensoriales, los movimientos del brazo robótico evitando el daño a las plantas y la arquitectura de control y comunicación utilizada bajo ROS (Robot Operating System).
La segunda etapa, correspondiente a la fase de pruebas reales en campo, requirió la implementación de un sistema de localización novedoso para tener mayor precisión en la aplicación del tratamiento con el brazo robótico. Este método se basa en las medidas obtenidas de la hilera del cultivo mediante un sistema láser. Con él se extraen detalles singulares del entorno (esquinas, bordes, etc.) que sirven para resituar al robot con respecto a los cultivos. Así, en una primera observación del terreno se obtiene un mapa global sobre el que se localizan las plantas y se evalúan sus necesidades particulares. En la segunda observación, el robot obtiene una visión local detallada y actualizada, la sitúa en el mapa global y, en base al análisis de las imágenes multiespectrales, aplica el tratamiento adecuado.
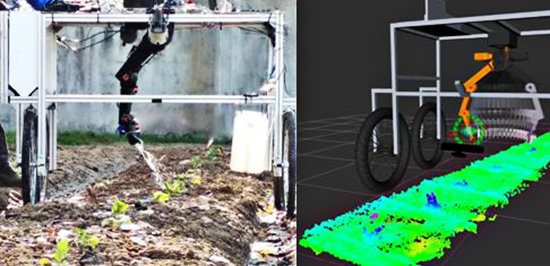
Fertilización llevado a cabo en los campos de la ETSIAAB (izquierda) y visualización de sistemas sensoriales en tiempo real (derecha).
El trabajo conjunto entre el grupo de investigación LPF-Tragalia, encargado del análisis de necesidades vegetativas de las plantas, y el grupo de Robótica y Cibernética, responsable del sistema robótico, ha permitido llevar a cabo la fertilización de cultivos en base a los objetivos estratégicos del proyecto europeo.
En opinión de Antonio Barrientos, investigador de la UPM: “Este proyecto presenta resultados muy prometedores dentro del campo de la robótica aplicada a la agricultura de precisión, obteniendo como principales logros una optimización en la cantidad de fertilizante orgánico aplicado en zonas específicas de plantas con necesidades concretas, gracias a los sistemas de localización y percepción implementados que utilizan sensores de alta tecnología.”
CHRISTYAN CRUZ ULLOA, ANNE KRUS, ANTONIO BARRIENTOS, JAIME DEL CERRO, CONSTANTINO VALERO. "Robotic Fertilisation Using Localisation Systems Based on Point Clouds in Strip-Cropping Fields". Agronomy 2021, 11(1), 11.
Fuente: ‘e-Politécnica Investigación e Innovación’ (nº 570), boletín de la UPM.